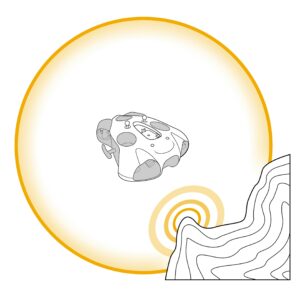
The obstacle avoidance is done by means of an acoustic signal.
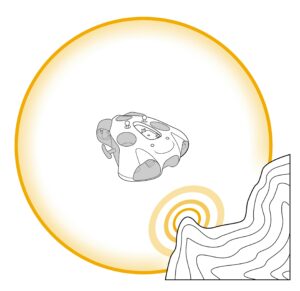
The drone detects obstacles in a radius of 1 meter to 1.5 meter around it; it can be represented as a sphere of about 3 meters in diameter with the drone in its centre.
Obstacle avoidance therefore only activates from a depth of 2 meters to avoid detecting the water surface as an obstacle.
When the drone detects an obstacle, its reaction is to slow down or stop, to take height and start again.
This loop will repeat itself as many times as the drone detects the obstacle.
(Sand, landforms, algae, air bubbles, another diver, an object floating in the water etc. can be considered as obstacles by the drone.)
During the obstacle avoidance action, the green LED on the front of the drone flashes to show you the obstacle detection.
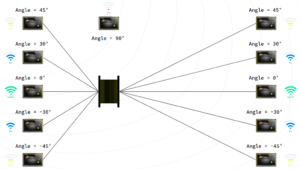
If the diver moves forward while the drone slows down following an obstacle detection, the distance between the drone and the diver will increase and may reach a threshold where communication between the transmitter of the underwater remote control and the drone will no longer be operational – The drone will no longer receive a valid signal from the underwater remote control.
If the absence of a valid signal continues for more than 90 seconds, the drone will enter a protective mode, and will engage the “surface” scenario to return to the surface automatically.
Once it reaches the surface, it will disarm and stabilize at a depth of about 50 cm, waiting to be recovered or to receive a new order.
It is always recommended to monitor the drone and keep in mind that once on the surface the drone can be carried away by the swell and drift.